現行のアレスティには、ローリングループ(注1)及びナイフエッジ飛行(ナイフエッジ・ループを含む:注2)は存在しない。存在しないからといって、飛行が不可能なわけではない。以下に、これらの機動を盛り込んだアンノウン・シーケンス図と、対応する飛行動画を並置する。これらの機動の可能なバリエーションは多岐に渡るが、試したものは以下のとおりである。
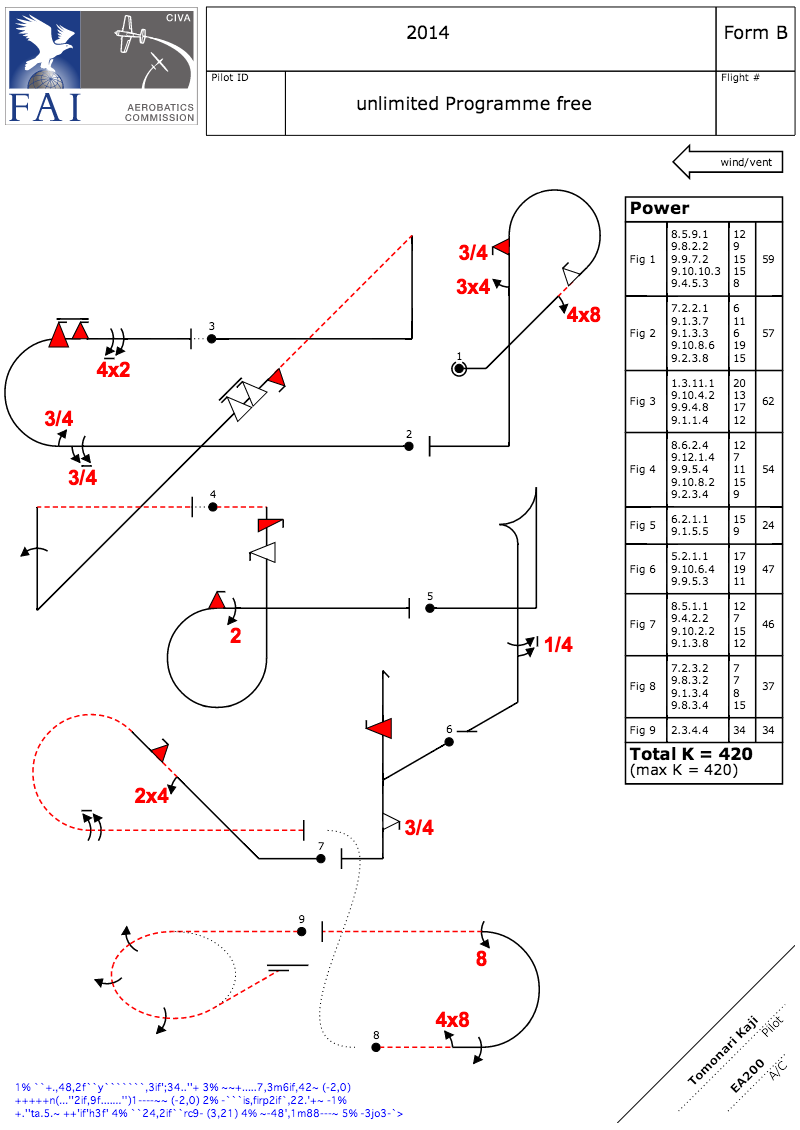
ホリゾンタル・ナイフエッジ(シーケンス1のfig2とfig3のつなぎ、シーケンス2のfig6とfig7のつなぎ、シーケンス3のfig10の天辺)
普通のナイフエッジ飛行である。低速だと、基本水平飛行を保つことはできなかったが、ナイフエッジスクエアループの天辺のように、上昇滑りから下降滑りへの以降を伴った放物線機動の場合、機首の位置を一定に保つことにより、地上から見た際の浮き沈みを錯覚により相殺し、仮の水平ラインを出すことができるようだ。高速でのナイフエッジは、試すのを忘れてしまった。



ローリングループ系の機動は、従来のループ以上に柔軟な姿勢認識が必要である。特に上に向かってロールしている場合、地平線はつねに回転しているため、従来のループのように単に横を見るだけでは何の判断基準にもならない。視野角範囲内全体の色の配置とその回転をしっかりと満遍なく知覚しながら、一見何も指標が無いように見える空(実際はおだやかな色のグラデーションがあるので視野さえ開けていれば地上を見ているのと同じ)に自分のたどるべき道をしっかりと思い描いて飛ばなければ、すぐにオフヘディングしてしまう。一度できるようになると、ほんとうに自由に飛べているような気がして最高に楽しく、これまでにない開放感を感じるはずである。
注1)ローリングループとは、ループの軌跡にロールを織り込む機動である。現行のアレスティにも、ループの天辺あるいは下辺に任意の弧角の範囲内で指定のロールを行う科目は存在するが、ここで私の言っているローリングループとは、弧角もロール角度も指定された科目を指す。
注2)ナイフエッジループとは、その名のとおりナイフエッジ状態での宙返りである。つまり、ヨー方向に向かって行うループ。鑑賞者に対して機体は常に背面もしくは腹面を見せた状態で円弧を描くことになる。
注2)ナイフエッジループとは、その名のとおりナイフエッジ状態での宙返りである。つまり、ヨー方向に向かって行うループ。鑑賞者に対して機体は常に背面もしくは腹面を見せた状態で円弧を描くことになる。
■ナイフエッジ系統
ホリゾンタル・ナイフエッジ(シーケンス1のfig2とfig3のつなぎ、シーケンス2のfig6とfig7のつなぎ、シーケンス3のfig10の天辺)
普通のナイフエッジ飛行である。低速だと、基本水平飛行を保つことはできなかったが、ナイフエッジスクエアループの天辺のように、上昇滑りから下降滑りへの以降を伴った放物線機動の場合、機首の位置を一定に保つことにより、地上から見た際の浮き沈みを錯覚により相殺し、仮の水平ラインを出すことができるようだ。高速でのナイフエッジは、試すのを忘れてしまった。
垂直上昇からのクオーター・ナイフエッジループ(シーケンス1のfig2、シーケンス2のfig6、シーケンス3のfig10)
フライオーバーするハンマーを途中で止めるようなもの。ラダーを踏む際の速度が早すぎるとラダーが(胴体が??)失速するだけで、全く機首は転向してくれない。かといって遅すぎるとループ後の水平を保てない。エクストラ200だと90−100ktくらいがほどよい感じであった。水平飛行時においても、80ktがもっともラダーの効く速度帯であることはすでに確認されており、垂直上昇時の知見と整合的である。
フライオーバーするハンマーを途中で止めるようなもの。ラダーを踏む際の速度が早すぎるとラダーが(胴体が??)失速するだけで、全く機首は転向してくれない。かといって遅すぎるとループ後の水平を保てない。エクストラ200だと90−100ktくらいがほどよい感じであった。水平飛行時においても、80ktがもっともラダーの効く速度帯であることはすでに確認されており、垂直上昇時の知見と整合的である。
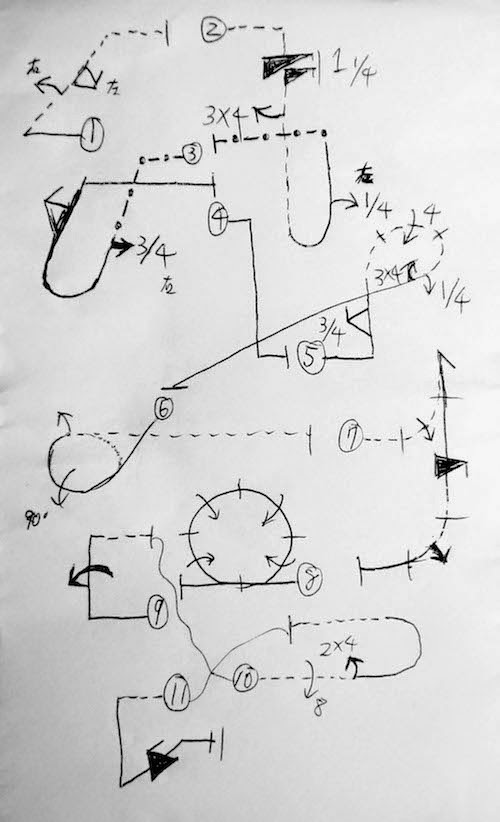
ホリゾンタル・ナイフエッジからのクオーター・ナイフエッジループ(シーケンス2のfig7、シーケンス3のfig10)
大きな滑りを伴った垂直降下ラインとして帰結するため、これに引き続くロールやループを安定してこなすために相応の順応が必要となる。アンリミテッド競技者にとっては、スピンやスナップ後のロールとしてお馴染みのテクニックであろう。
大きな滑りを伴った垂直降下ラインとして帰結するため、これに引き続くロールやループを安定してこなすために相応の順応が必要となる。アンリミテッド競技者にとっては、スピンやスナップ後のロールとしてお馴染みのテクニックであろう。
ホリゾンタル・ナイフエッジからの45度ナイフエッジループ(シーケンス1のfig3)
非常に簡単であり、多くの機体で実現可能であることが想像される。
非常に簡単であり、多くの機体で実現可能であることが想像される。
■ローリングループ系統
4ロール・フル・ローリングループ(シーケンス1のfig8)
4ロール・フル・ローリングループ(シーケンス1のfig8)
セグメントを区切れば区切るほど、ラダーで旋回しなければいけない弧角が減る。低パワー機には最適なローリングループ。4回もロールすれば、ラダーは機首を維持する程度+αで使っておけば、それなりにロールとヨーが調和しているように見える。2ロール目の後半にスナップするリスクがあるので慎重に回さないとHZをくらってしまう。誰も採点する人はいないのだが。
1ロール・ハーフ・ローリングループダウン(シーケンスのfig8)
ループダウンにはアップとは違った難しさがある。アップの難しさは速度の減衰に起因する失速や円弧の変化などであったが、ダウンでは速度がついてくるためラダーに拠るヨーイングが難しくなってきて、コーディネートしづらくなる。特にロール回転数の少ないローリングループの場合、この問題が顕著になる。
ループダウンにはアップとは違った難しさがある。アップの難しさは速度の減衰に起因する失速や円弧の変化などであったが、ダウンでは速度がついてくるためラダーに拠るヨーイングが難しくなってきて、コーディネートしづらくなる。特にロール回転数の少ないローリングループの場合、この問題が顕著になる。
1ロール・クオーターローリングループ(シーケンス1のfig7)
簡単にできる。
3ロール・225度ローリングループ(シーケンス2のfig5)
キューバンの一部としていれこむことができるので、ローリングループから45度ラインへと以降するリズム感がたまらない。
キューバンの一部としていれこむことができるので、ローリングループから45度ラインへと以降するリズム感がたまらない。
ハーフロール・クオーターローリングループ(シーケンス1のfig7)
ヨーに多少難有り。
3/4ローリングループ(シーケンス3のfig2)
この機動の重要な点は、ヘディングを変えることができることである。垂直上昇時のハーフ(ないしは3/4)ロールに相当する役割を、シーケンス中でもたせることができる。開始ヘディングの水平線あたりを睨みながらやれば、姿勢が分からなくなることもなく楽に飛べる。下向きの場合ヨーに難有り。
3/4・3クオーターローリングループ(シーケンス3のfig5)
ユニークな機動である。8?の切り返し点(中間点)は、はぼヨーのみで主張することになる。やはりループダウンでのラダー操作が難しい。やったあとで気づいたが、これができるなら1ロール・フルローリングループも案外できるのかもしれない。この科目については地上からの評価を受けていないので、形が成立しているのかどうかはわからない。
シーケンス1
シーケンス2
シーケンス3
シーケンス4
ローリングループ系の機動は、従来のループ以上に柔軟な姿勢認識が必要である。特に上に向かってロールしている場合、地平線はつねに回転しているため、従来のループのように単に横を見るだけでは何の判断基準にもならない。視野角範囲内全体の色の配置とその回転をしっかりと満遍なく知覚しながら、一見何も指標が無いように見える空(実際はおだやかな色のグラデーションがあるので視野さえ開けていれば地上を見ているのと同じ)に自分のたどるべき道をしっかりと思い描いて飛ばなければ、すぐにオフヘディングしてしまう。一度できるようになると、ほんとうに自由に飛べているような気がして最高に楽しく、これまでにない開放感を感じるはずである。